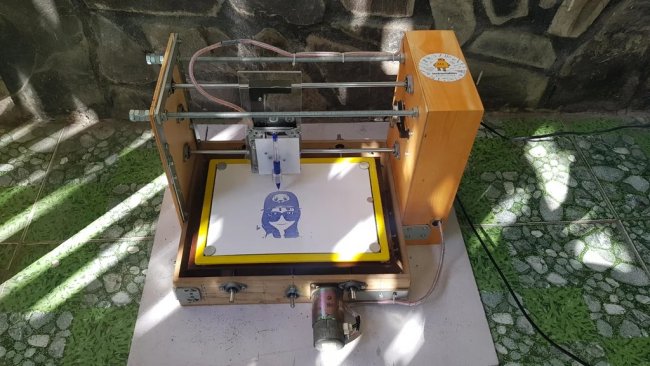

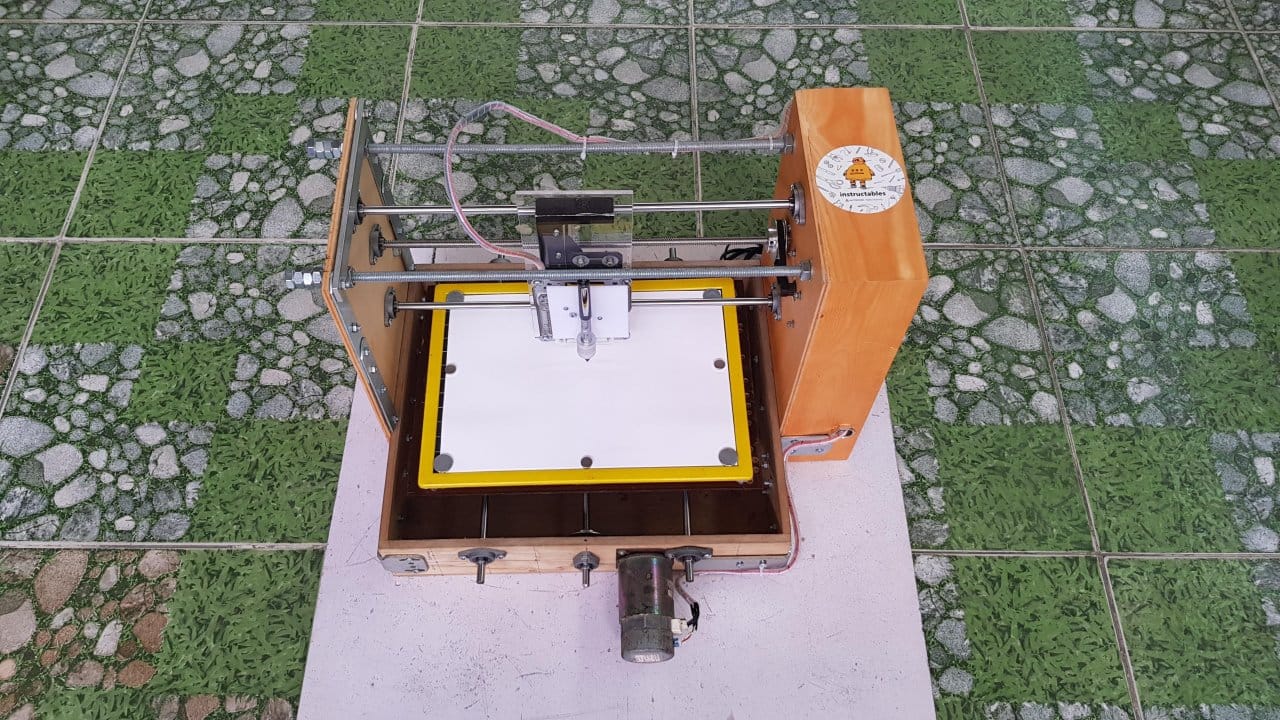
Как построить 3-осевой станок с ЧПУ в домашних условиях? Об этом нам расскажет мастер-самодельщик с ником Tuenhidiy. Многие детали в этой сборки используются повторно. Например, 2 старых серводвигателя постоянного тока и 2 деревянных ящика для вина.
Давайте посмотрим небольшое видео.
Инструменты и материалы:
-Деревянный ящик 350 x 400 x 80 x 8 мм. (Ш x Д x В x Т);
-Деревянный ящик 220 x 340 x 100 x 10 мм. (Ш x Д x В x Т);
-Arduino Uno R3;
-Arduino Mega 2560;
-Arduino CNC Shield V3 GRBL;
-Драйвер шагового двигателя A4988;
-Arduino L293D Motor Shield;
-Сервомотор постоянного тока NF5475E 2 -шт;
–Привод CD / DVD-ROM;
-Опора шагового двигателя 50 мм – 2 шт;
-GT2 6 мм ремень 200 мм – 2 шт;
-GT2 Шкив 60 зубьев – 2шт;
-Стержень 8 мм, длина 400 мм – 4 шт;
-2 ходовых винта T8, шаг 2 мм, шаг 8 мм, длина 400 мм;
-Алюминиевая муфта с гибким валом, размер внутреннего отверстия: 10 мм x 10 мм;
-Горизонтальный кронштейн для шарикоподшипника – 12 шт;
-Вертикальный кронштейн для шарикоподшипника – 4 шт;
-Подшипники F608ZZ 8 x 22 x 7 мм – 2 шт;
-Макетная плата;
-Блок питания 12 В 10 А;
-Блок питания 5В 5A;
–Разъем постоянного тока;
-Ленточный кабель;
-Акрил 5 мм;
-Доска для рисования;
-Резьбовые вставки;
-Неодимовые магниты 16 шт;
-Кабельные стяжки;
-Крепеж;
-Сверлильный станок;
-Паяльные принадлежности;
Шаг первый: схема проекта
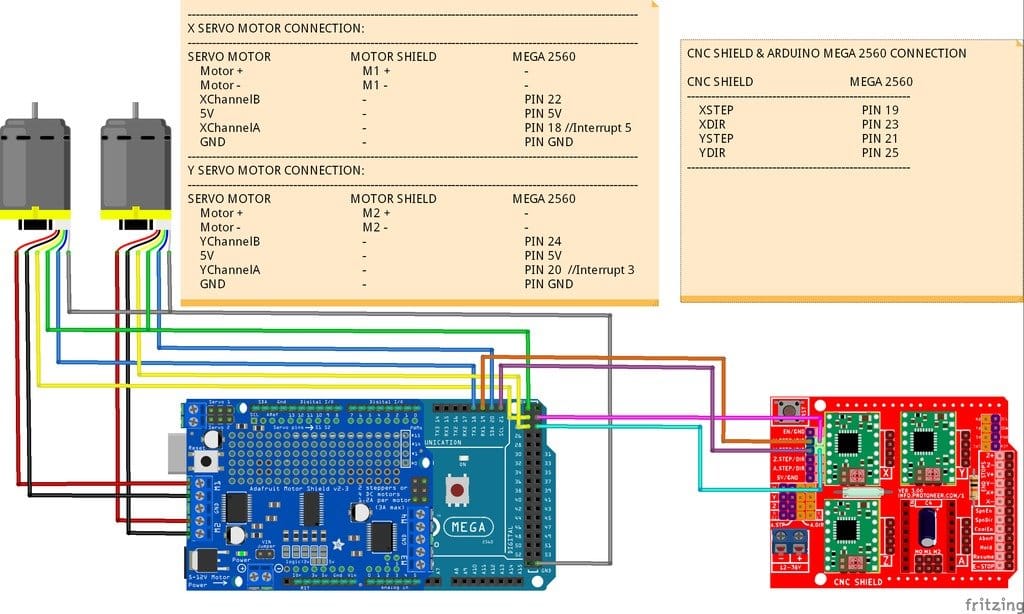
Схему проекта можно скачать здесь. Для ЧПУ мастер использует 2 сервомотора постоянного тока для осей X, Y и 1 шагового двигателя для оси Z.
На схеме есть 3 группы:
Группа 1 – красная: включает Arduino Uno с предустановленной прошивкой GRBL и CNC Shield. Arduino Uno отвечает за отправку управляющих сигналов: Шаг / Направление на драйвер серводвигателя постоянного тока X, Y и драйвер шагового двигателя Z.
Группа 2 – синяя: включает Arduino Mega 2560 и L293D Motor Shield, которые работают как драйвер серводвигателя постоянного тока. Они получают команды STEP / DIR от Arduino Uno и выполняет ПИД-регулирование для осей X и Y.
Группа 3 – коричневая: включает серводвигатель постоянного тока X, Y.
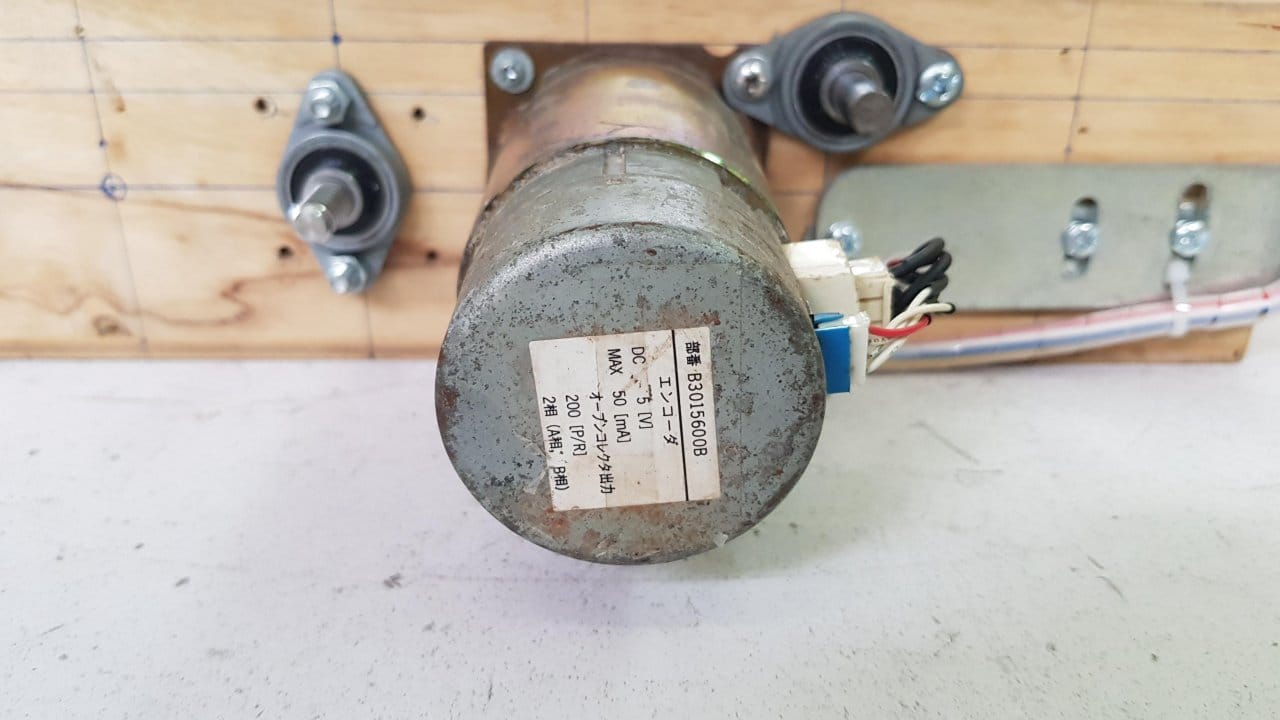
Шаг второй: серводвигатель постоянного тока
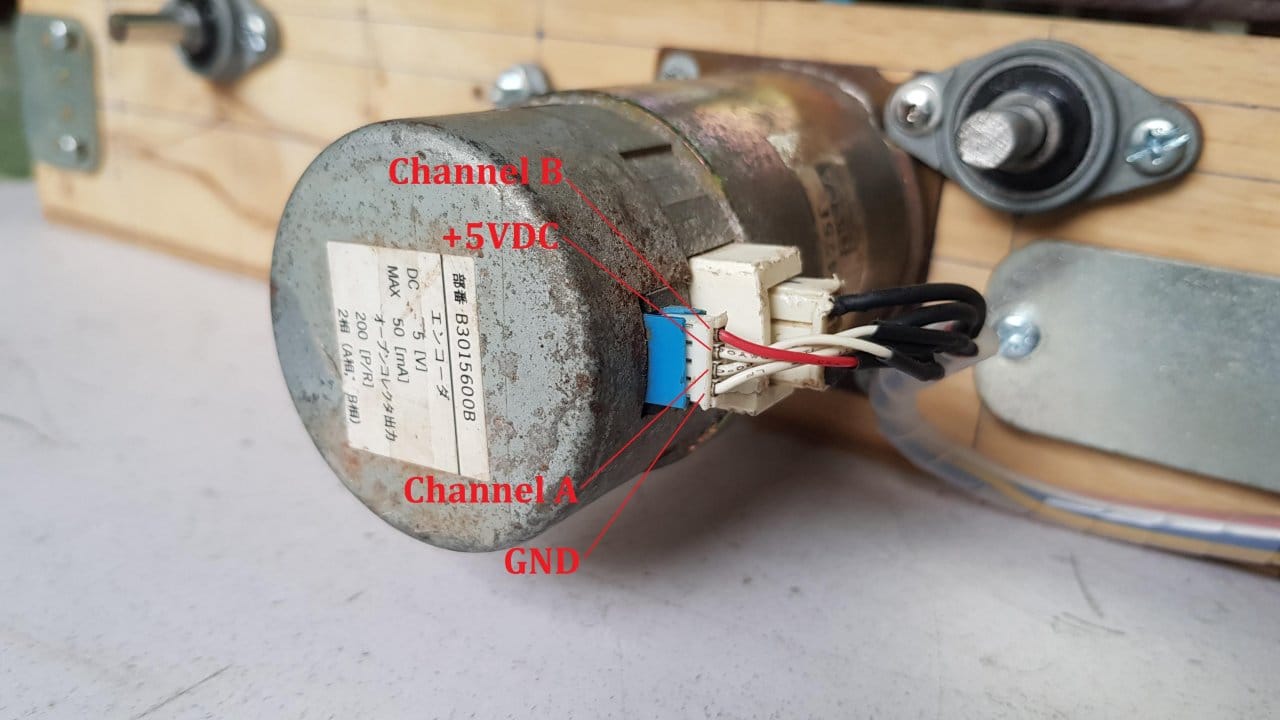
Параметры основного серводвигателя постоянного тока NF5475E отмечены красным прямоугольником на фото.
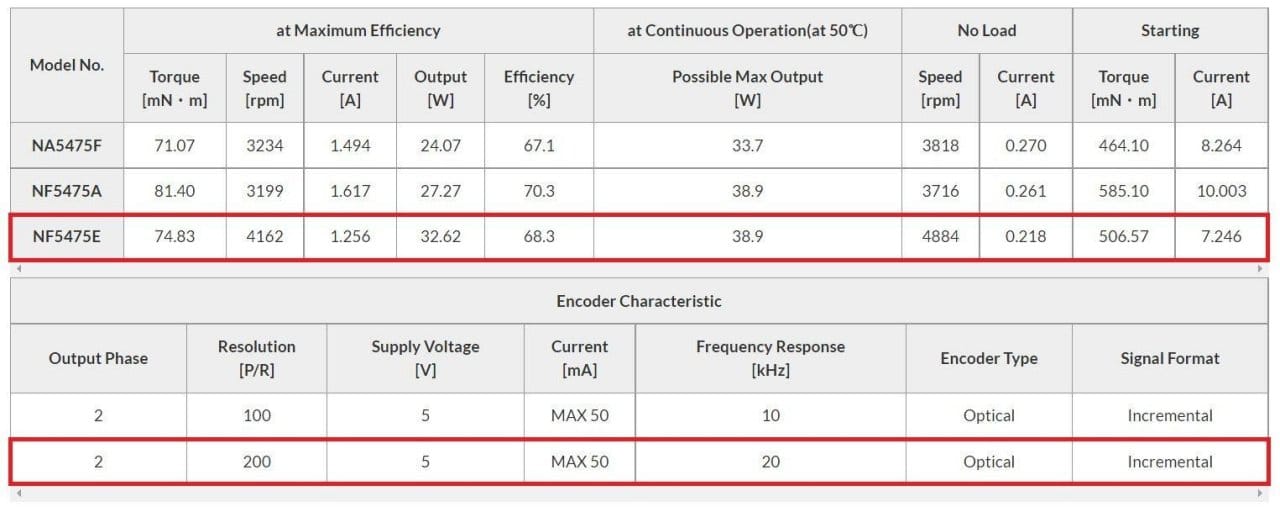
Для питания мастер использовал источник питания 12 В постоянного тока, потому что это напряжение совместимо с L293D Motor Shield. Если использовать источник питания 24 В постоянного тока, модуль управления двигателем должен иметь более высокий уровень напряжения, например L298N.
Энкодер должен получать питание от 5 В постоянного тока, и он имеет два канала A, B. Разрешение энкодера 200 200 импульсов на оборот. Т.е. энкодер будет генерировать 200 импульсов, когда двигатель совершит один оборот.
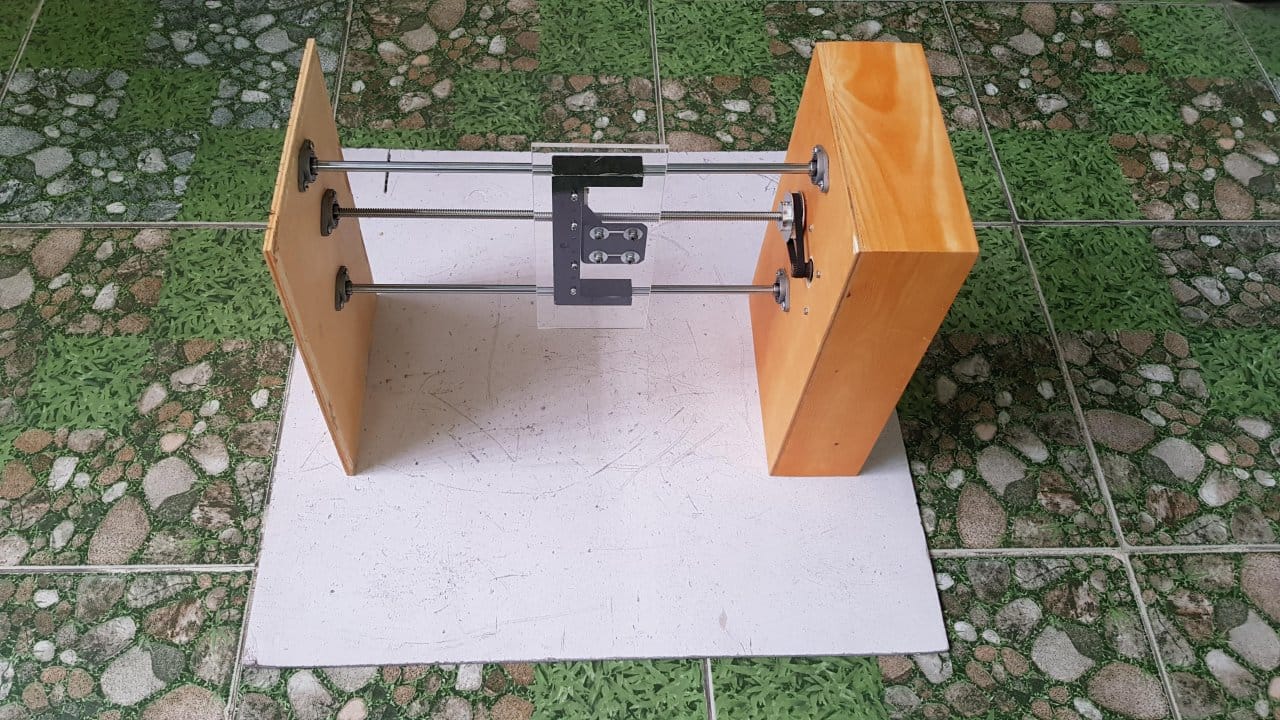
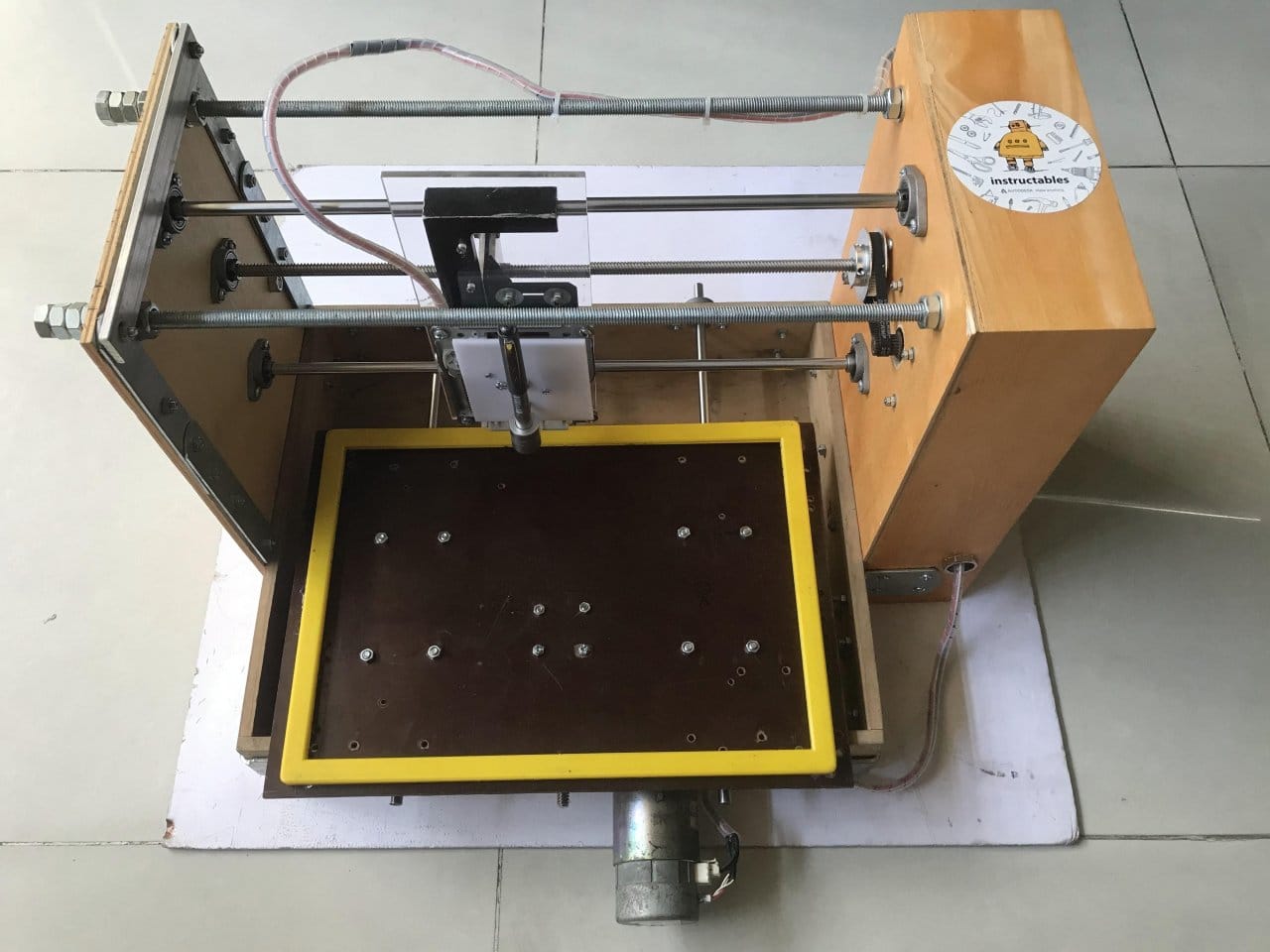
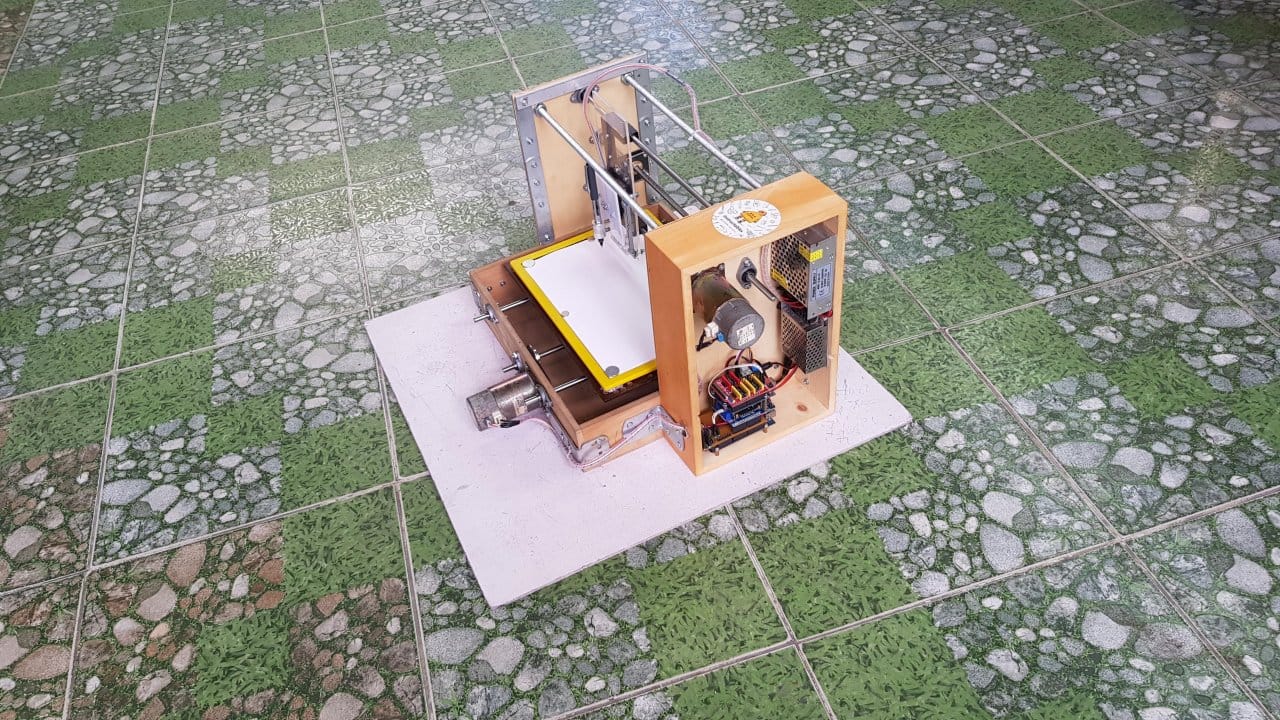
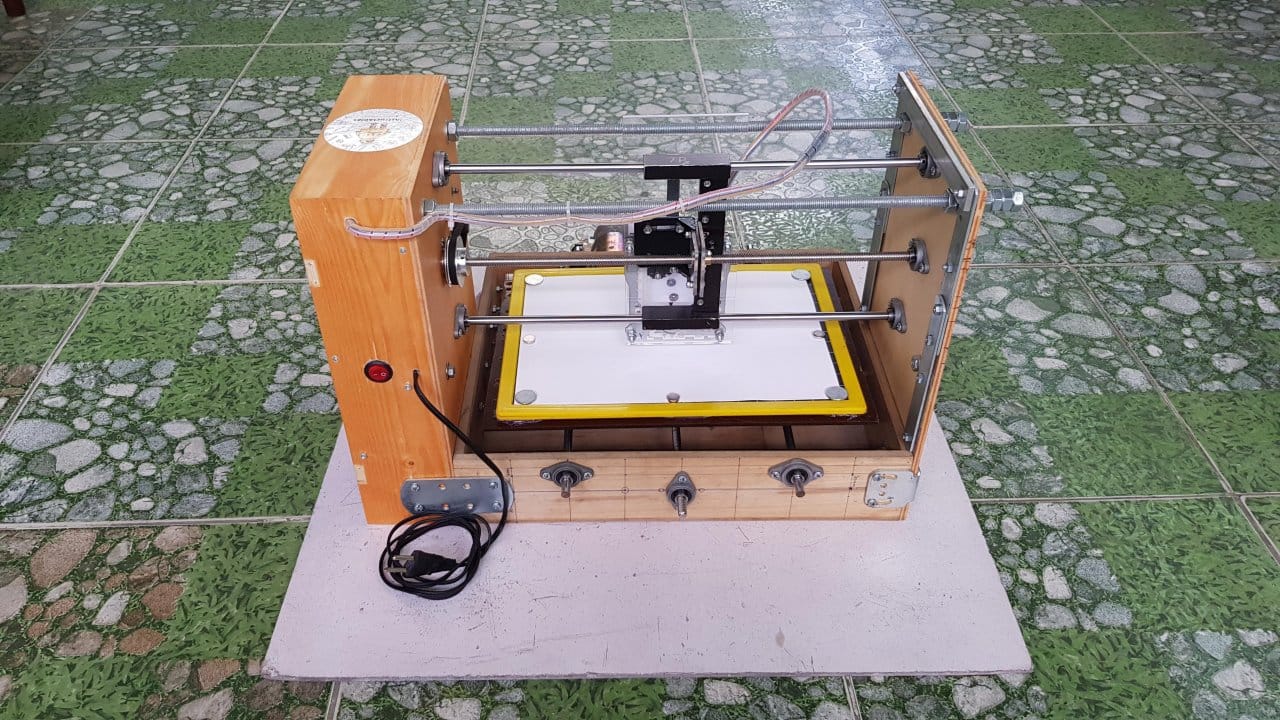
Шаг третий: сборка станка
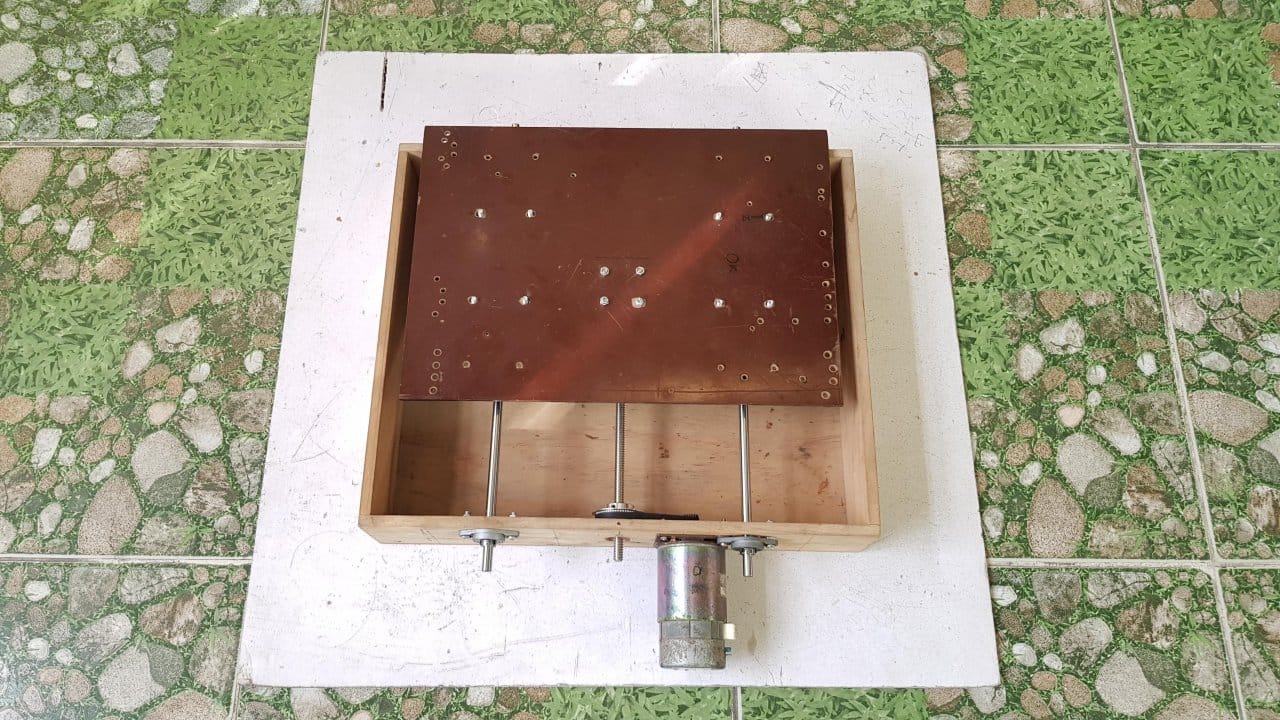
Построение оси Y
Сначала мастер измерил двигатель, ремни и шкивы. На старом серводвигателе установлен шкив с 20 зубьями. Мастер заменил его на шкив с 60 зубьями + зубчатый ремень 200 мм для привода ходового винта.

В ящике просверлил отверстия. Установил опорные подшипники. Установил ходовой винт и стержни.

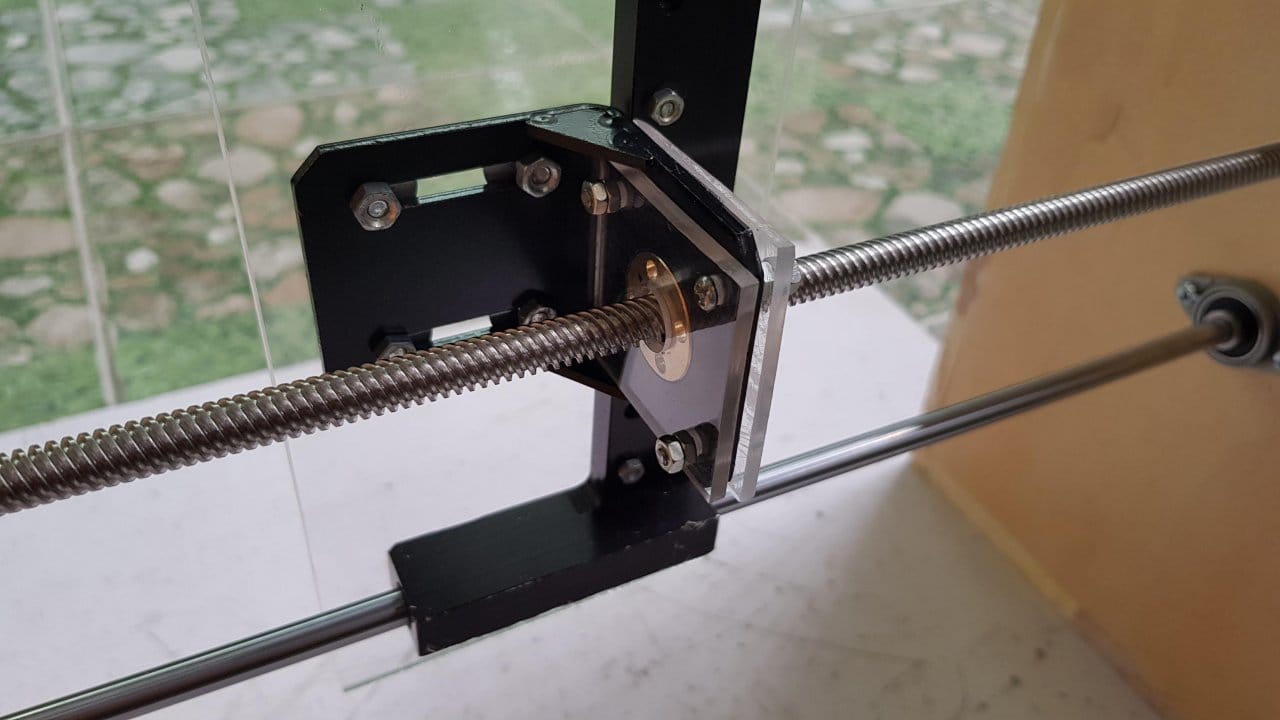
Монтаж рабочей поверхности по оси Y
В качестве рабочей поверхности мастер использовал ламинированную доску.
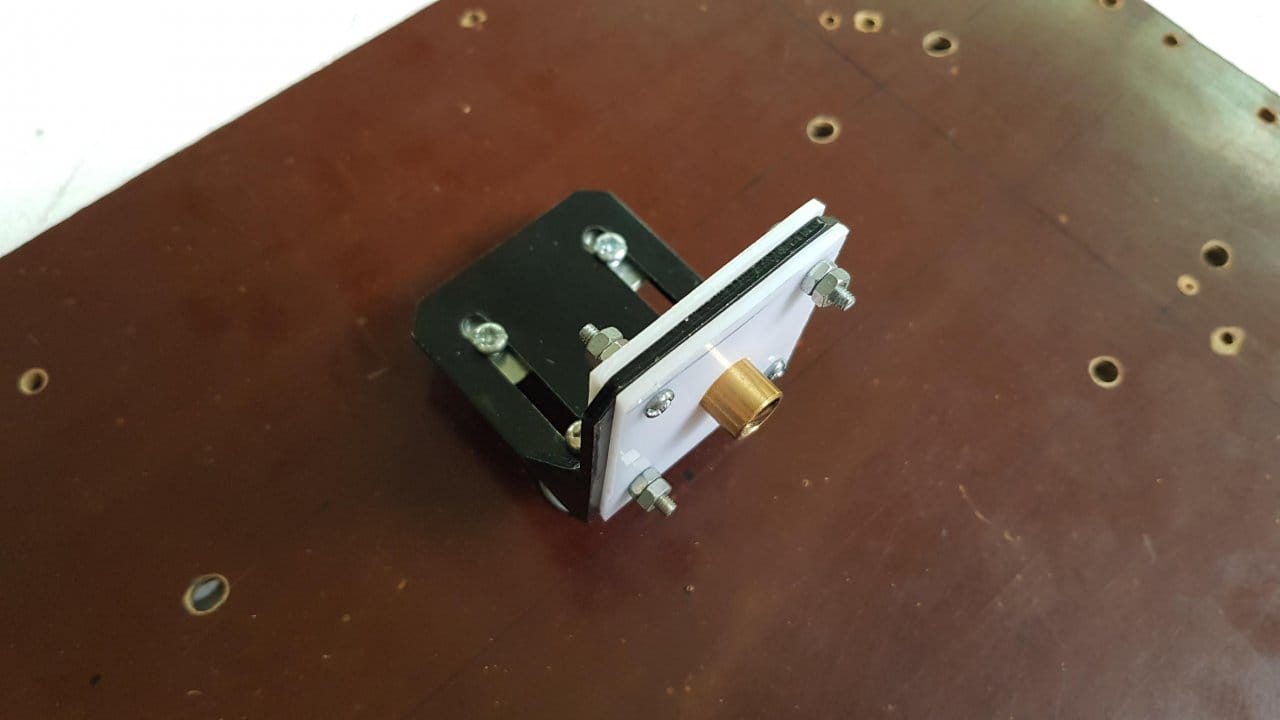
Чтобы зажать медную гайку ходового винта, он использовал опору шагового двигателя L и 2 акриловые пластины, как на картинке ниже. Диаметр отверстия L-образной опоры и медной гайки совмещены.
Затем платформу нужно закрепить на опорных подшипниках + ходовой винт.

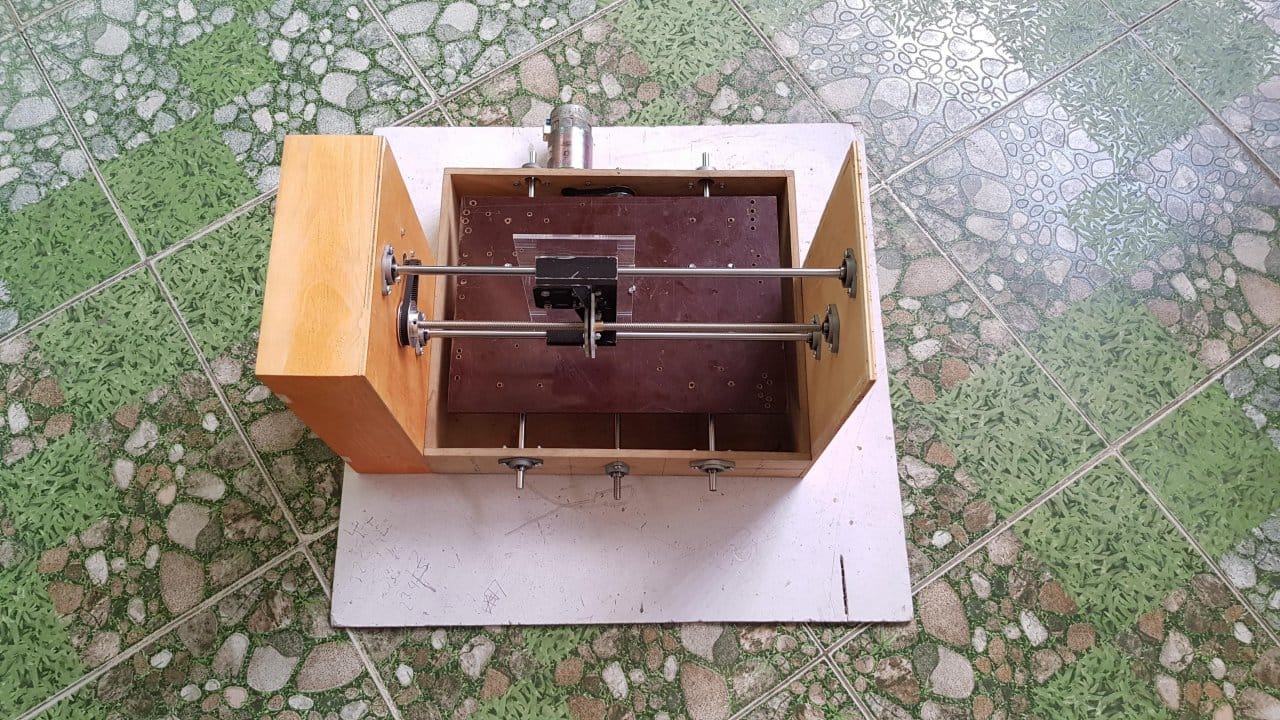
Построение оси X
Маленькая коробка использовалась для того, чтобы построить структуру оси X. Как и ось Y, он использовал дополнительный шкив с 60 зубьями и зубчатый ремень 200 мм для привода ходового винта.
Серводвигатель оси X спрятан внутри коробки. Один акриловый лист размером 100 x 230 мм был установлен на оси X, а позже на нем будет установлен CD-привод для оси Z.

Медная гайка ходового винта зажимается между опорой двигателя L-образной формы и двумя небольшими акриловыми листами, как и ось Y. Дальше собирает две оси вместе.
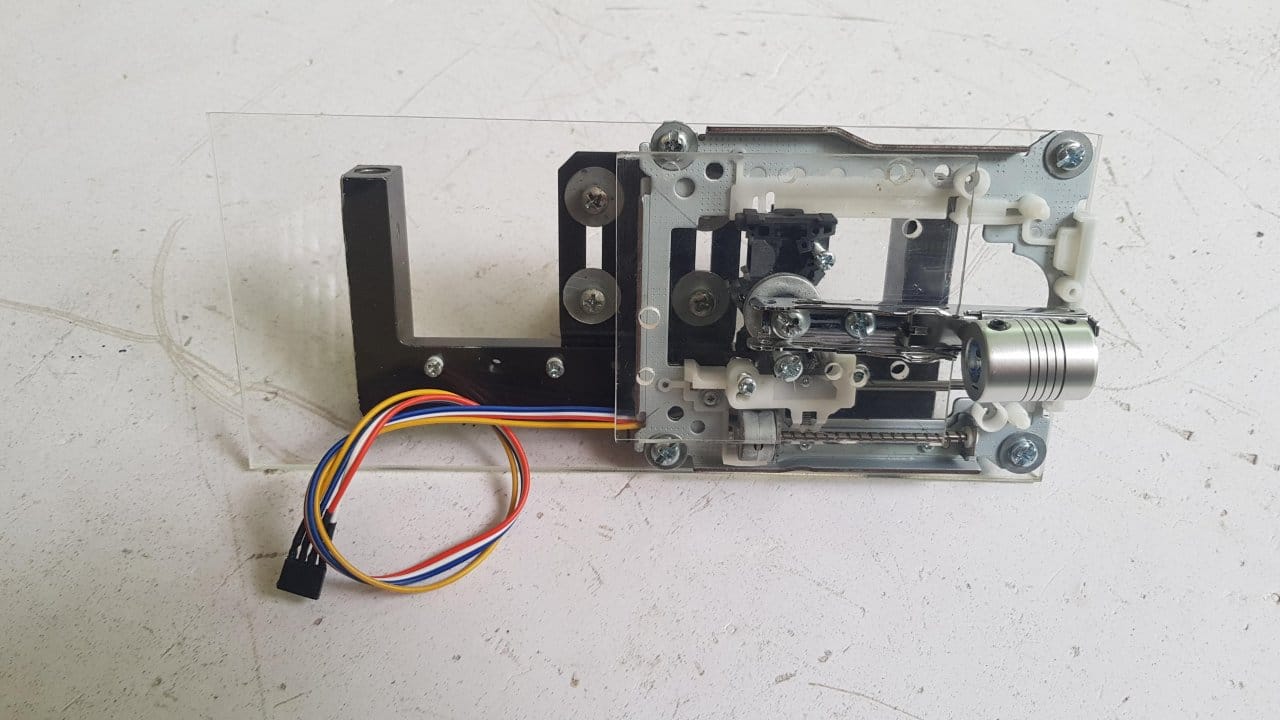
Построение ось Z
Для оси Z мастер использовал CD-привод. Ручка / карандаш зажимается алюминиевой муфтой.
Далее раму укрепил шпильками. Установил рабочий стол.
Шаг четвертый: монтаж платы управления
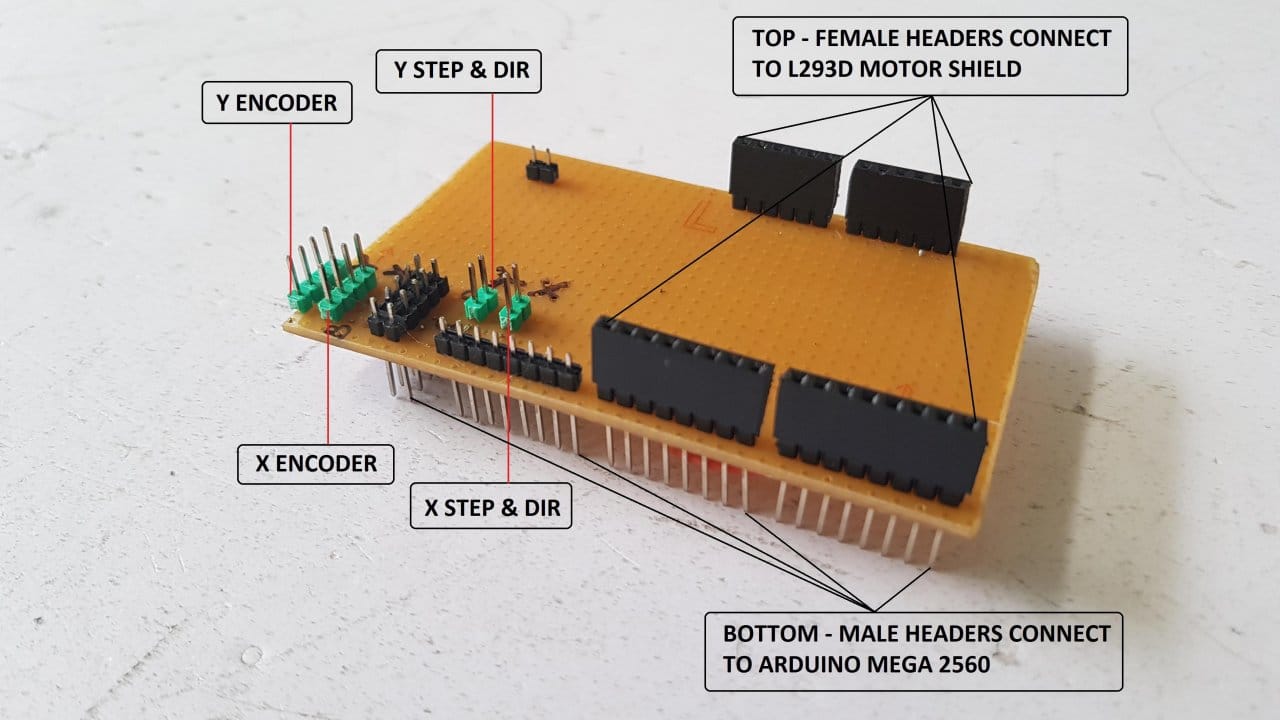
Arduino Mega Adapter Shield.
Дальше нужно вырезать плату 60 x 90 мм и смонтировать все детали. Adapter Shield используется для подключения Arduino Mega 2560 к L293D Motor Shield, энкодерам серводвигателей постоянного тока следующим образом:
Верхний разъем: подключение к L293D Motor Shield.
Нижний разъем: подключение к Arduino Mega 2560.
4 контакта – верхние штекерные разъемы: подключение к сервомотору X Encoders (5 В, GND, канал A, канал B).
4 контакта – верхние штекерные разъемы: подключение к сервомотору Y Encoders (5 В, GND, канал A, канал B).
2 контакта – верхний штекерный разъем: подключение к сигналам X.STEP и X.DIR.
2 контакта – верхний штекерный разъем: подключение к сигналам Y.STEP и Y.DIR.
Распиновка разъема энкодера на серводвигателе NF5475E, должна быть такой, как показано ниже.
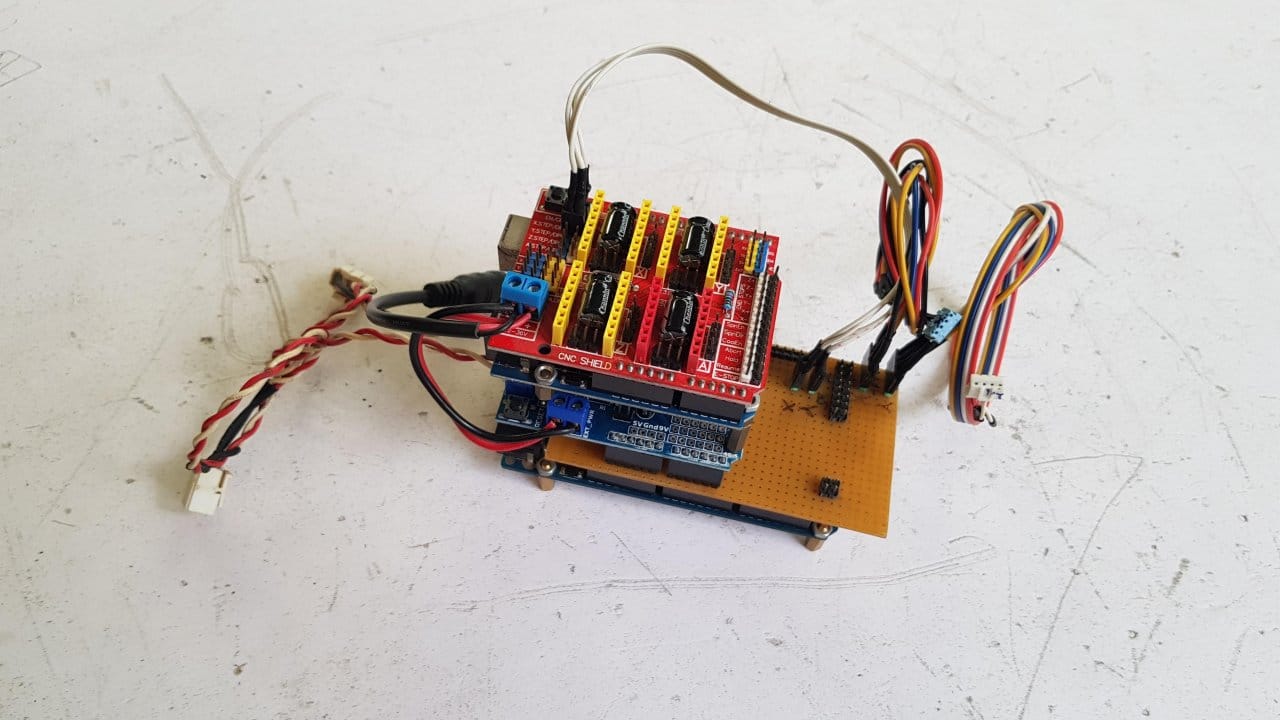
Сборка платы управления
Затем собирает детали в следующем порядке:
Ардуино Мега 2560.
Плата
L293D
Arduino Uno
Плата расширения
Устанавливает плату управления и блоки питания (5 и 12 В постоянного тока) внутри маленькой коробки.
Устанавливает выключатель.
Шаг пятый: программирование
Код Arduino Mega 2560 можно скачать ниже.
Показать / Скрыть текст
Для этого проекта нужно установить следующие библиотеки:
PID Бретта Борегарда (PID_v1)
Библиотека Adafruit Motor Shield (AFMotor)
Библиотека кодировщика
Библиотека FlexiTimer2
Шаг шестой: параметры GRBL
Параметры GRBL для ЧПУ следующие
Шаг седьмой: настройка ПИД-регулятора
Оптимальные параметры PID, которые соответствуют значениям настройки GRBL на предыдущем шаге следующие:
// The PID parameters double KP_X = 10.0; // P for X servo motor double KI_X = 0.03; // I for X servo motor double KD_X = 0.02; // D for X servo motor double KP_Y = 10.0; // P for Y servo motor double KI_Y = 0.03; // I for Y servo motor double KD_Y = 0.02; // D for Y servo motor
Он также применил функцию « d eadband » в ПИД-регуляторе. Серводвигатели постоянного тока работают без сбоев. Они не нагреваются и не перегреваются, даже если поддерживается их непрерывная работа в течение многих часов.
#define STEPSPERMM_X 300.0 // STEP/mm ($100) is used in the GRBL firmware for DC servo motor X axis. #define DEADBW_X 30.0 // Deadband width in pulses = 30.0 --> Acceptable error for positioning in mm: 0.10mm.[url=https://winder.github.io/ugs_website/download/]Универсальная платформа Gcode (UGS)[/url] #define STEPSPERMM_Y 300.0 // STEP/mm ($101) is used in the GRBL firmware for DC servo motor Y axis. #define DEADBW_Y 30.0 // Deadband width in pulses = 30.0 --> Acceptable error for positioning in mm: 0.10mm.
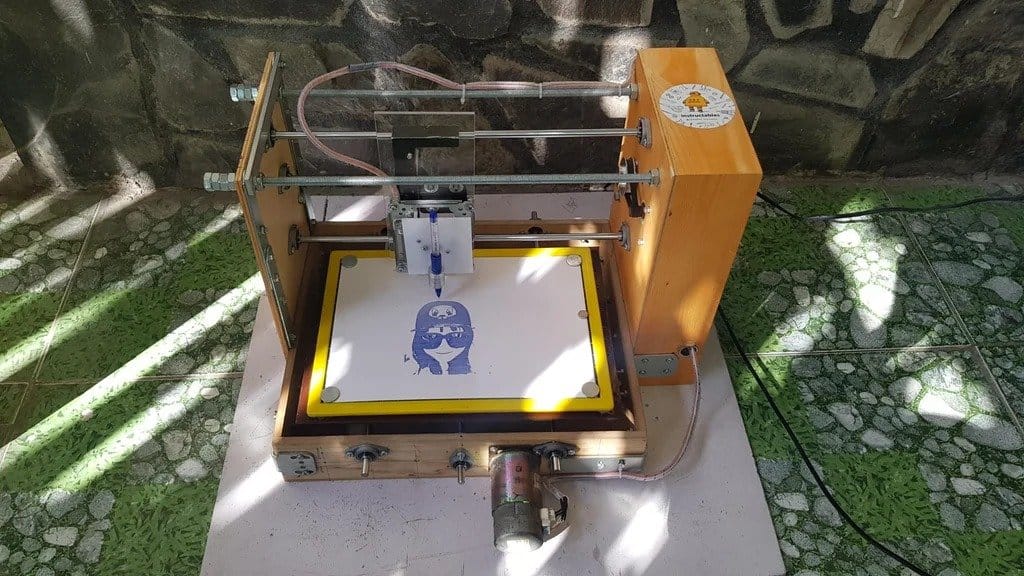
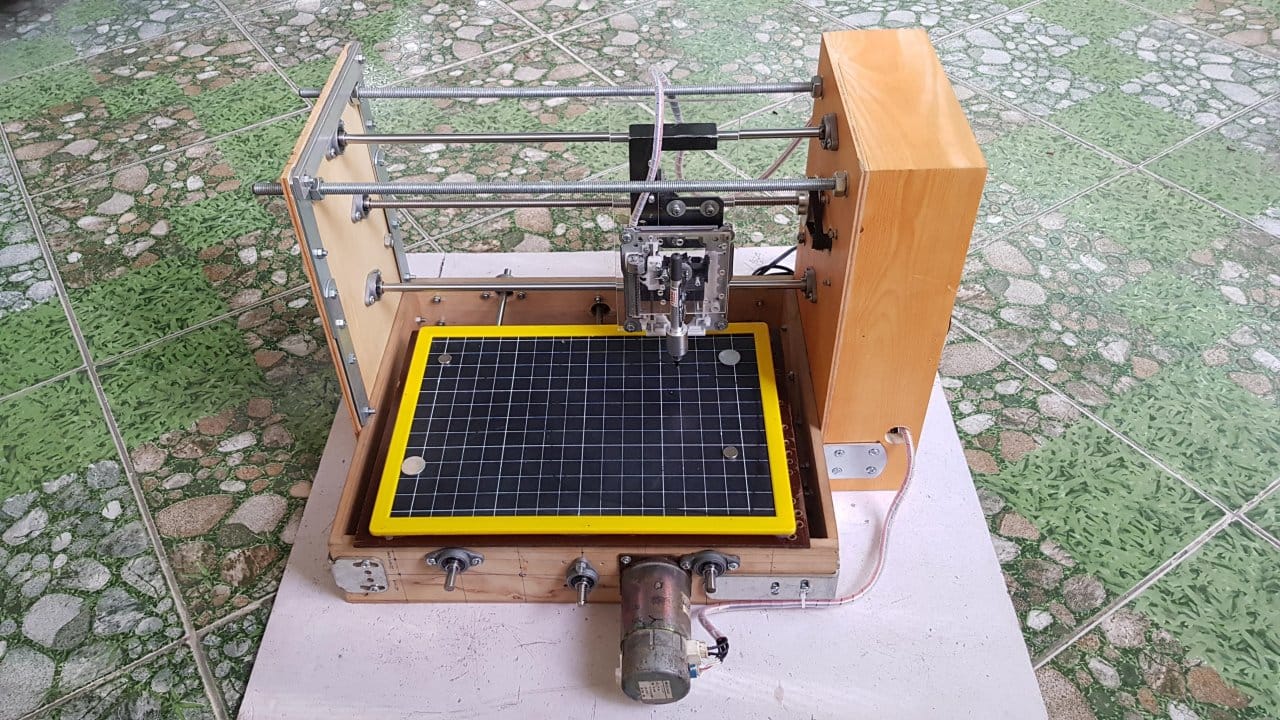
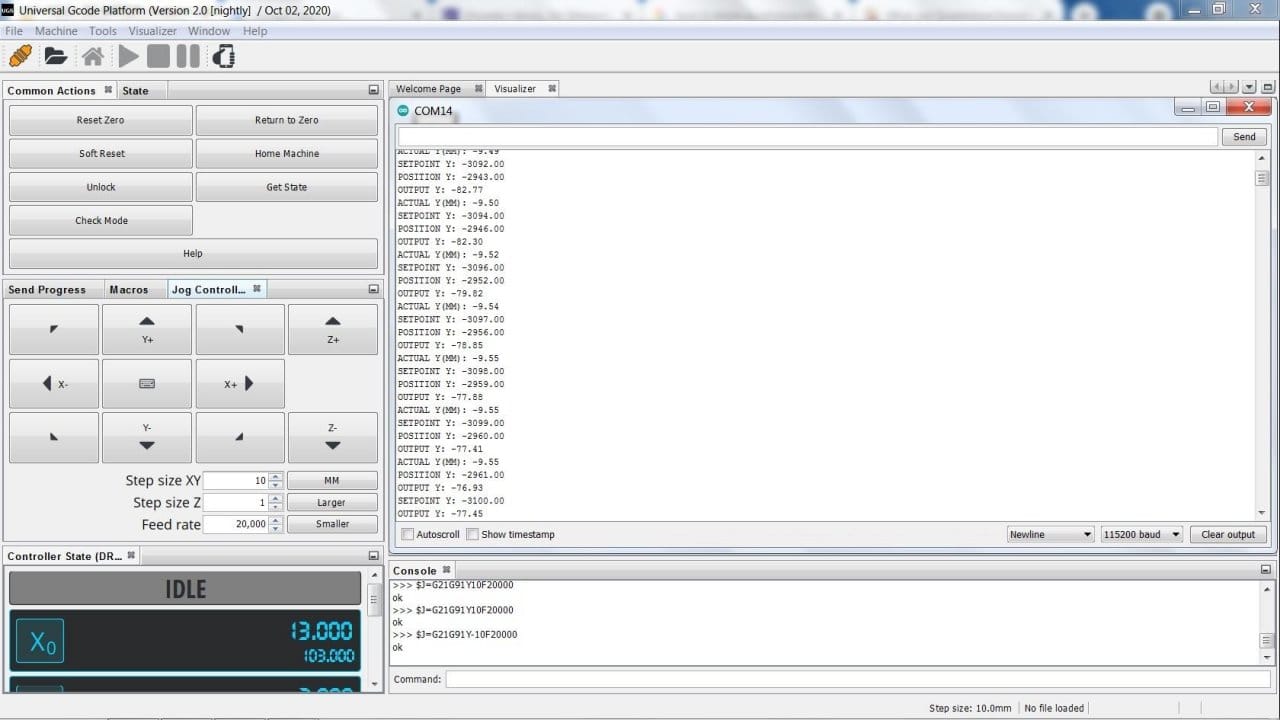
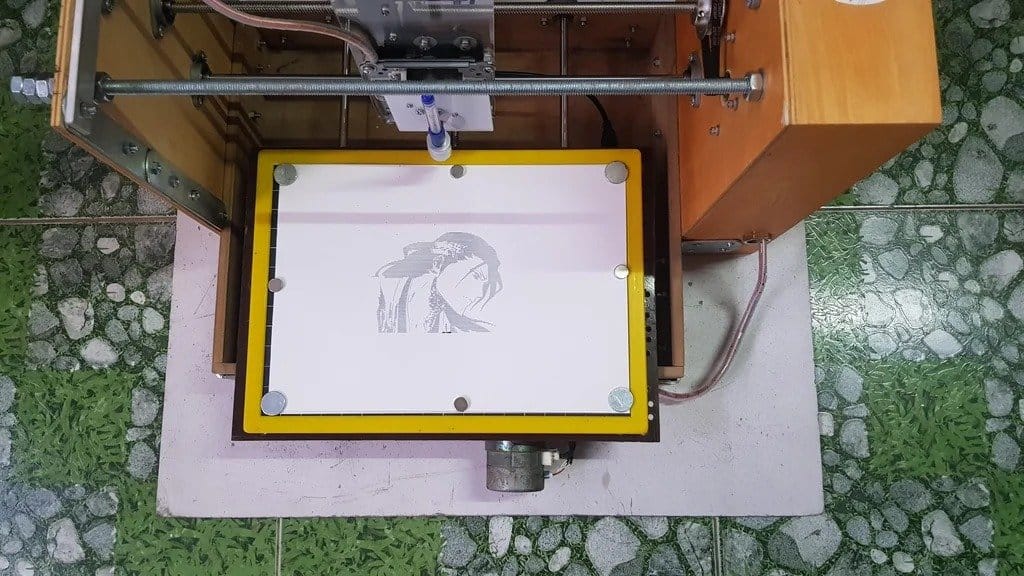
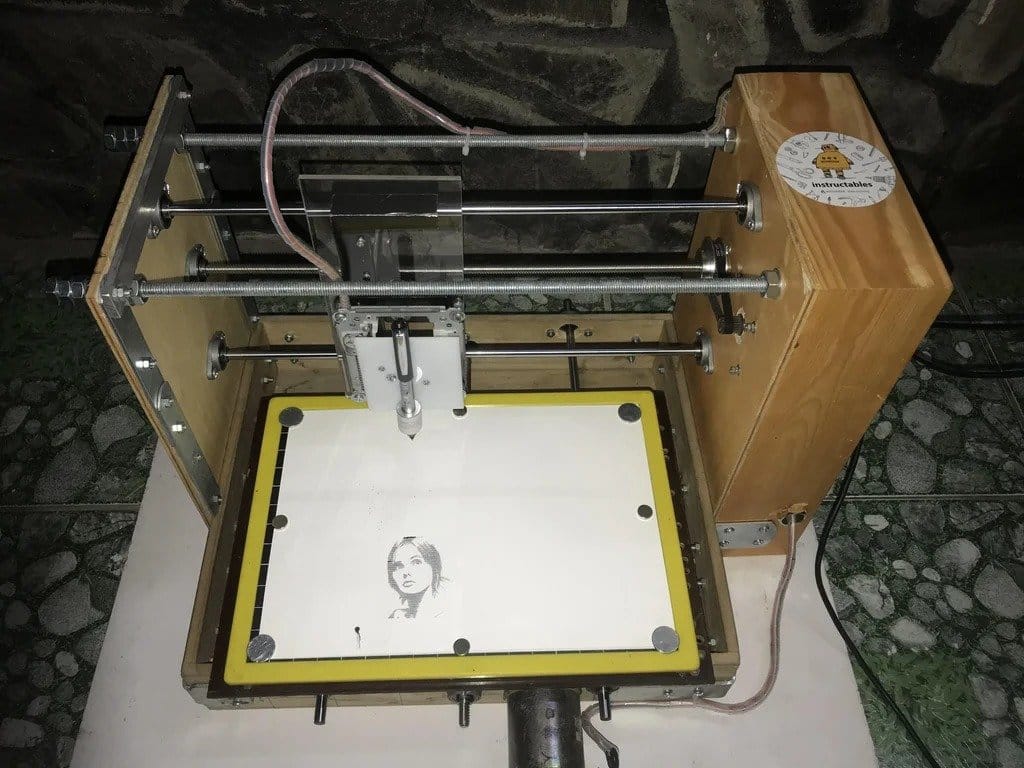
Шаг восьмой: тестирование
Теперь можно установить ручку в держатель, поместить лист на рабочем столе и протестировать устройство.
В этом проекте используются следующее ПО и расширения:
Прошивка GRBL
Универсальная платформа Gcode (UGS)
Inkscape 1.0
Расширения Gcodetools
AxiDraw Software 2.6.3 от Evil Mad Scientist Laboratories

Все готово.




