
Žingsninio variklio valdiklis EasyDriver A3967
Bičiulių svetainėje www.schmalzhaus.com sukurtas mikroskopinis dvipolis žingsninio variklio valdiklis yra pagrįstas A3967 lustu.
Charakteristikos:
- Didžiausia srovė: 750 мА vienoje fazėje.
- Variklio pavaros įtampa: nuo 7 V iki 30 V..
- Išėjimo srovės ribojimo galimybė: nuo 150mA iki 750mA
- 1/8, 1/4 ir 1/2 mikrožingsnių darbo režimai.
- 3 ir 5 voltų loginis valdymas.
- Tam nereikia atskiro loginės dalies maitinimo šaltinio, tam plokštėje yra LM317 stabilizatorius.
- Valdiklis nepalaiko vienpolių variklių.
Назначение элементов и выводов драйвера:
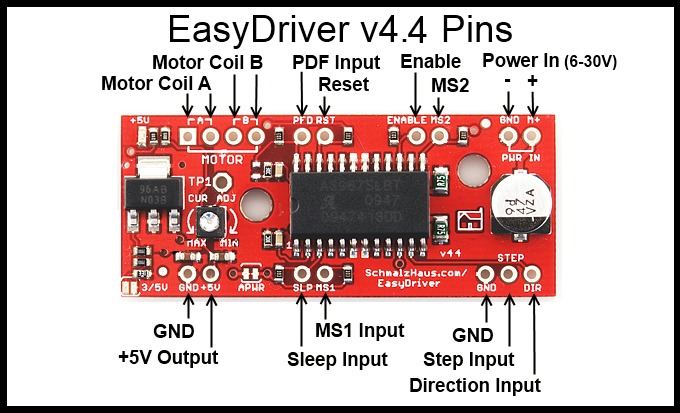
Išėjimai:
- MOTOR и выходы A и B — Подключение обмоток шагового двигателя. (A+ A- B+ B-)
- PFD — Percent Fast Decay Input, тонкие настройки ШИМ драйвера микросхемы, скорость нарастания ШИМ.
- RST — Сброс драйвера, при низком уровне сбрасывает внутренний транслятор и отключает все выходные драйверы.
- ENABLE — При низком уровне, отключатся все выходы драйвера.
- MS1 и MS2 — Управление микрошаговым режимом. По умолчанию входы притянуты к питанию и выставлен шаг 1/8. Для установки полного шага, на оба входа нужно подать низкий уровень, для полушага только на MS2, для 1/4 шага, только на MS1. (полный шаг (0,0), полушаг (1,0), шаг 1/4 (0,1) и шаг 1/8 (1,1).
- PWR IN и вход M+ — Напряжение питания драйвера и моторов, также это напряжение подается на стабилизатор LM317 для питания логической части микросхемы.
- +5V — Выход напряжения со стабилизатора LM317, можно использовать для питания Arduino
- SLP — Сон, если подать низкий уровень, будет отключена внутренняя схема для минимизации потребления энергии.
- STEP — Шаг, При переходе с низкого уровня на высокий, драйвер делает один шаг или микрошаг, если драйвер работает в микрошаговом режиме.
- DIR — Состояние входа (высокий\низкий) определяет направление вращения двигателя.
- GND — масса, все массы соединены.
Elementai:
- Потенциометр CUR ADJ — Установка ограничения максимального тока подаваемого на двигатель, от 150 мА до 750 мА.
- Перемычка APWR — отключает стабилизатор LM317 от цепи питания 5 вольт. По умолчанию соединена.
- Перемычка 3/5 — Установка напряжения на выходе LM317, 5 или 3.3 вольта, По умолчанию разомкнута.
Trumpai apie mikrožingsnio režimo ypatybes:
Сверху графики работы драйвера в полношаговом и микошаговом режиме.
В полношагом режиме, драйвер запитывает обмотки двигателя полным током, а направление тока в обмотках двигателя изменяется с каждым шагом. Считается штатным режим работы двигателя. Главное достоинство, простота реализации. Из недостатков, двигатель сильнее подвержен вибрации и резонирует на низких скоростях.
В микрошаговом режиме происходит деление шага, в данном случаи на 8, с каждым шагом обмотки запитаны не полным током, а уровнем изменяемым по синусоидальному закону. Такой метод дает возможность фиксировать вал в промежуточных положениях между шагами, увеличить количество шагов и точность позиционирования вала двигателя, уменьшает вибрацию двигателя, особенно на низких скоростях, но требует применения специализированных драйверов.
Prijungimas prie Arduino:
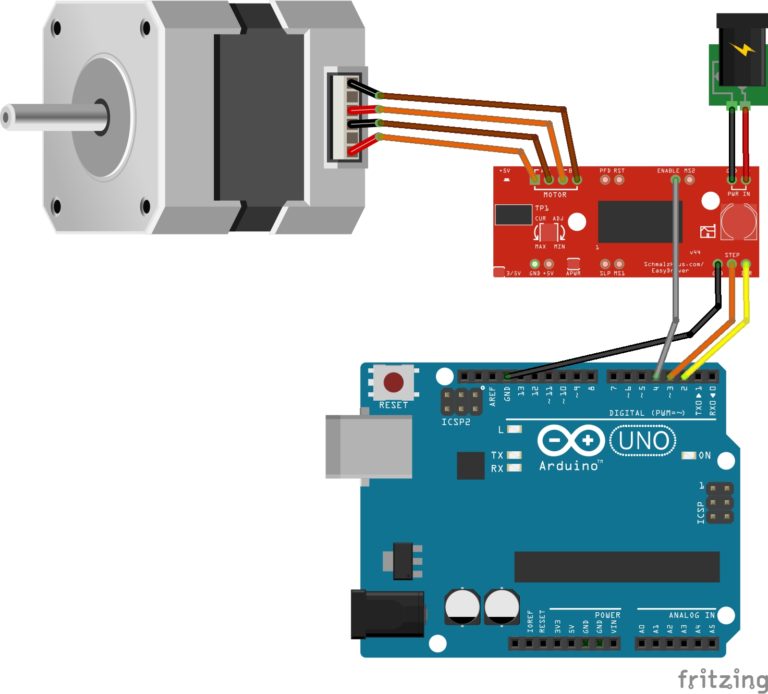
/// kodas iš vaizdainio https://youtu.be/yXoJgDPRips
#define STEP 7
#define DIR 6
void setup() {
pinMode(STEP, OUTPUT);
pinMode(DIR, OUTPUT);
}
void stepper(unsigned int Step, int Speed, boolean Set) {
digitalWrite(DIR, Set);
for (int i = 0; i < Step; i++){
digitalWrite(STEP, HIGH);
delayMicroseconds(Speed);
digitalWrite(STEP, LOW);
delayMicroseconds(Speed);
}
}
void loop(){
stepper(500, 500, 1);
stepper(1000, 200, 0);
stepper(500, 2000, 1);
stepper(100, 6000, 0);
}
